-
(0312) 427 0673

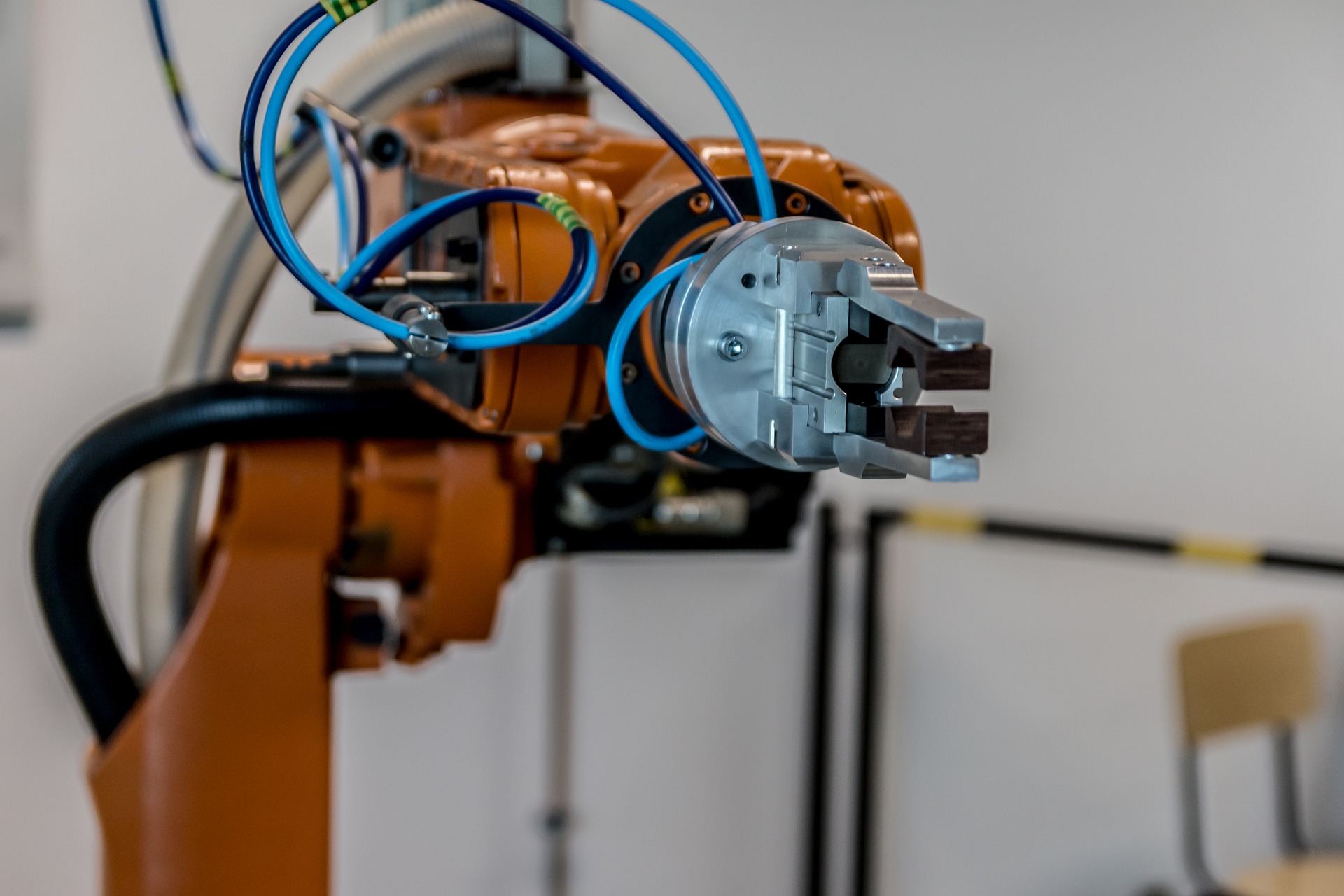
Compatible Robots for Rough Terrain

Robot platforms are designed to work under harsh conditions in many areas. We are working on strong, dynamic and robust robots that can work in these areas, such as stony, watery, muddy, bumpy, grassy, which may cause many of the robot platforms to fail.
With our work on robot platforms with high mobility, we aim to design new robots that are candidates for challenging missions. We are working to ensure that the robot platforms, which we plan to highlight with their resistance to harsh environmental conditions, also have the ability to move on inclined planes.

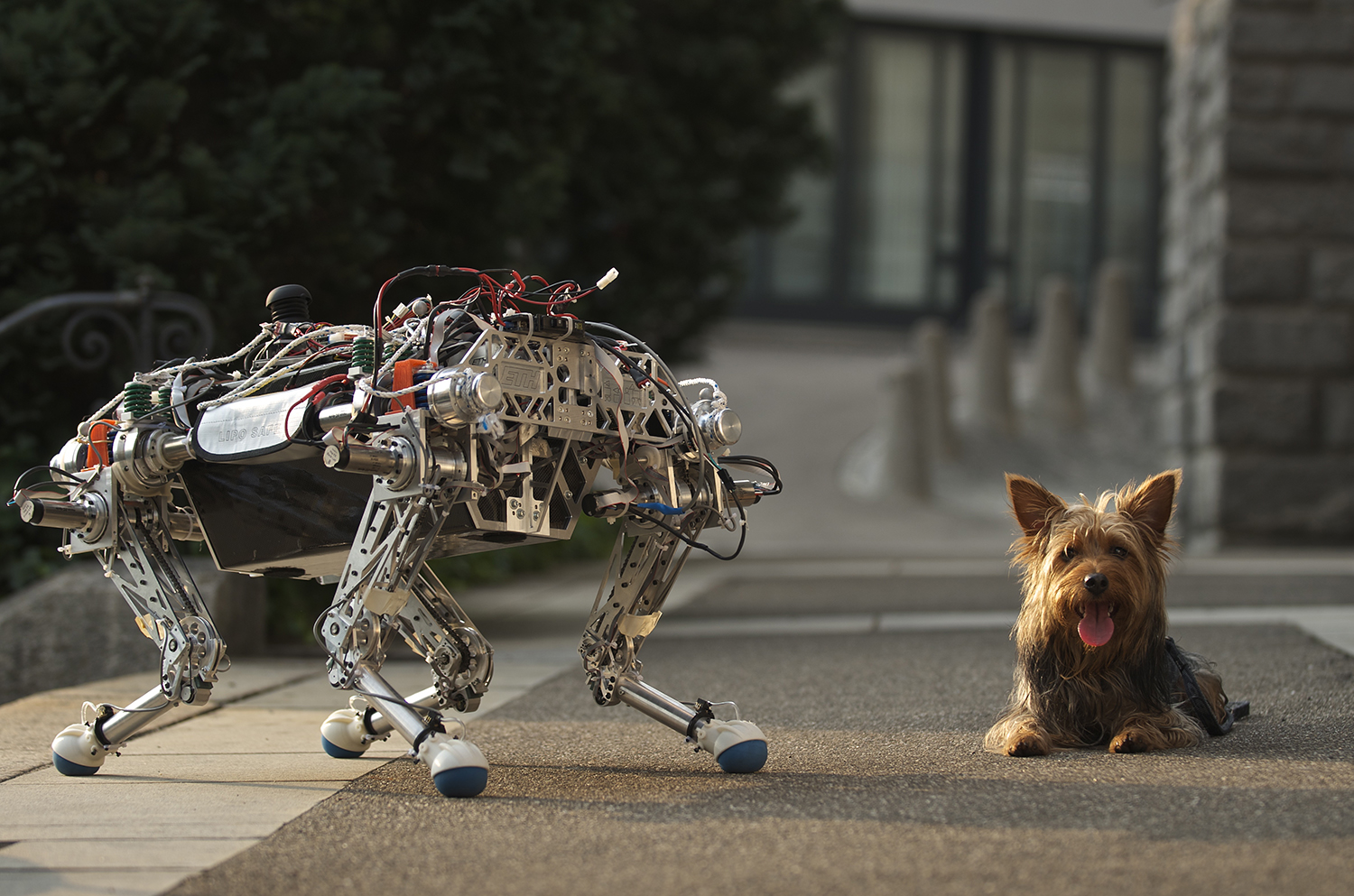
Robots with High Mobility

Swarm Robots
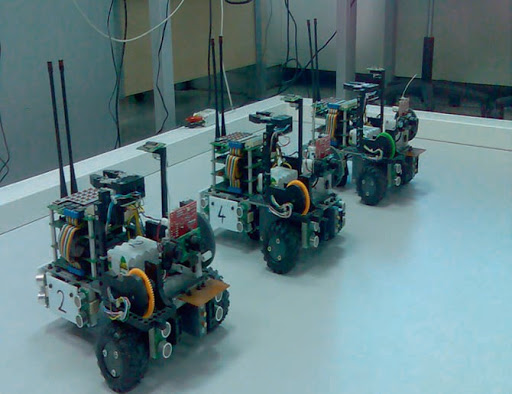
In addition to aiming to control more than one robot simultaneously with our swarm robots studies, we continue our efforts to establish an autonomous structure between them by establishing communication between other robots in the environment.